
サイバスロンの第1回大会が10月8日に行なわれた。10℃台前半と外の天候は寒かったが、それを全く感じさせない熱気が会場を包んだ。日本勢の結果も含め、まずは当日の結果をお伝えしたい。前日の10月7日に行なわれたTECH CHECK(実はこれも各チームの様子や実際のコースを間近に感じられる内容だった)や各競技の細かい紹介は、それぞれ個別にこのコンテンツの中で紹介していくので、お待ちいただきたい。
やはり観てみないとわからなかった
さて、サイバスロンについて簡単に振り返っておきたい。私自身、実際にものをみて認識を新たにしたところもあるので、それも含めて紹介したい。百聞は一見に如かずという言葉をこれほど実感したことはないくらい、ものを観てようやく全貌が見えてきたと思っている。特に、どのようなコースで実際に行なわれるかが大会前にはあまりわからなかったので、それを実際に見ることができたのは大きかった。装置の性能もさることながら、それをいかにパイロットが使いこなせているかで結果が大きく変わってくるため、見るほどに奥深さを感じさせてくれる競技会が繰り広げられた。
サイバスロンの競技の方向性は、障がいを持ったアスリートが自分の活動を補うための電動の装具・装置を操り、正確に課題をクリアできるか、いかに早く課題をクリアできるかを競うというものだ。早さが優先するのではなく、正確さが勝負に反映されるようになっていることが大きなポイントだ。ちなみに、課題は身の回りの作業を盛り込んだ内容になっている。電動で制御する装具を使わず、陸上競技や球技などのスポーツで競い合うパラリンピックとはコンセプトが異なる。
種目は、電動義手レース、電動義足レース、電動車イスレース、電動外骨格(下半身の動きをロボットスーツのようなものと考えていただきたい)レース、電気的刺激(FES)自転車レース、ブレイン・コンピューター・インターフェース(以下、BMI)・レースの6つの競技が行なわれた。
6種目の結果レポート
このコンテンツの中ですでに紹介しているが、日本チームは、メルティンMMIが電動義手レースとFESレースに、和歌山大学RT-Mooversが電動車イスレースに、Xiborgが電動義足レースに参加した。

まずはどんな会場で各競技が行なわれたのか紹介したい。アイスホッケーのリンクを利用した会場には、直線コースと周回コースが設けられた。義手、義足、外骨格、車イスは直線コース(60、70mくらいだと思われる)で、FESは周回コース、BMIはアイスホッケーの選手の控えピットを特別仕様にして競技が行なわれた。
では、それぞれの競技の結果について、コース紹介とあわせながらお伝えしていこう。
■電動義手レース
直線コースに6つの課題ゾーンが設けられ、ゾーンごとに点数が決まっており、点数の合計で勝敗が争われる。点数が同じ場合は、先にゴールした方が勝ちというルールだ。様々な形をしたブロックを別のテーブルに移し替える、トレーの上に物をのせて落ちないようにスロープを上り下りする(途中に扉の開閉がある)、電球を取り替える、缶を開ける、ボトルを開ける、パンを切る、洗濯物を干すといったまさに日常で遭遇しそうなシチュエーションが障害として用意されている。
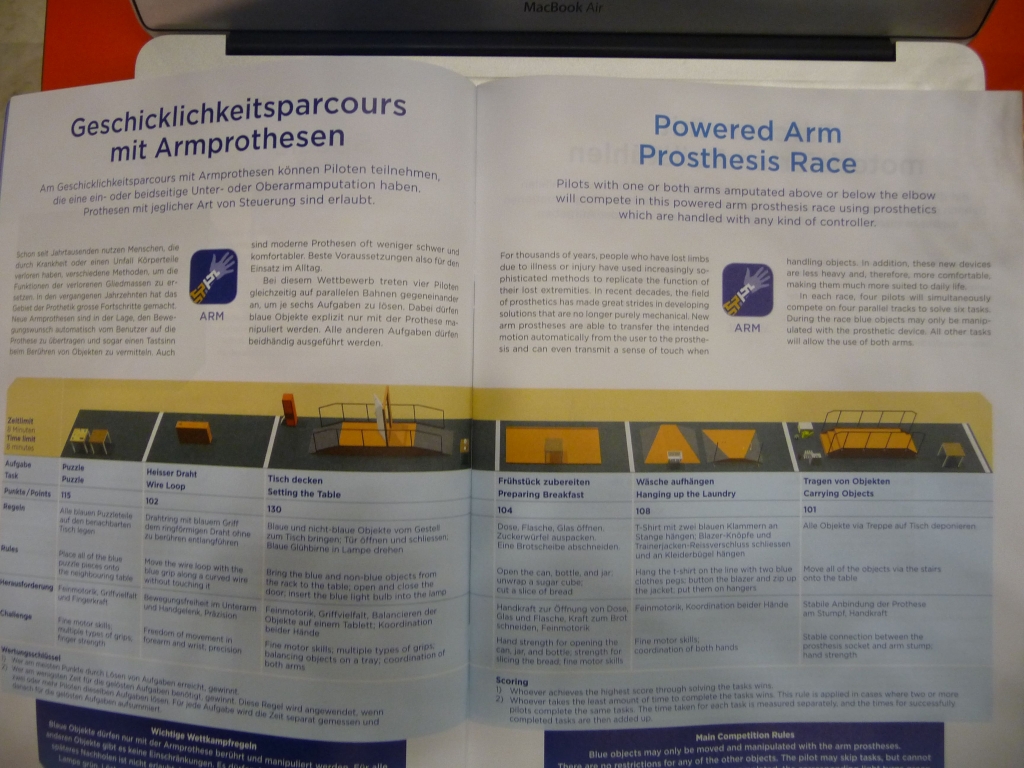
予選の後、上位4チームがAファイナル、次点の4チームがBファイナルに出場して順位を決定する。メルティンはBファイナルに進出し、8位入賞となった。優勝は、オランダから出場したDIPO Power。他のチームが5指の義手だったのに対し、このチームは唯一カニのハサミのような義手で出場し、見事に優勝を勝ち取った。

試合結果→http://www.cybathlon.ethz.ch/en/cybathlon-news/cybathlon-results/arm-results.html
■電動義足レース
個人的にはこのレースが最も技術レベルが高いレースになったと感じた。コースには、義手と同じく6つの課題が設定されているが、課題の内容が異なる。ソファに座る動作を5回繰り返す、ハードルをくぐる、飛び石をジャンプして渡りきる、皿の上にリンゴをのせて片方の手で持ち、もう片方は手でリンゴを握って手すりがつかめない状態で階段を上り下りする、といったバランスや膝やかかとの絶妙な力の入れ具合が求められる障害が設置されている。
義足も予選の後、上位4チームがAファイナル、次点の4チームがBファイナルに出場して順位を決定するが、Xiborgは残念ながら予選敗退となってしまった。普段から競技に使ったものと同じ装具をつけているチームが多い中、大会に向けて開発を進めていたことがビハインドに働いてしまった可能性もあるが、次回に期待したい。上位3位は全てアイスランドのチームが独占した。3チームともに660点の満点をマークし、タイムの勝負となった。2位のOssureRunLegを3秒の僅差かわしたOssurRheoKneeが優勝した。

試合結果→http://www.cybathlon.ethz.ch/en/cybathlon-news/cybathlon-results/leg-results.html
■FES自転車レース
FESレースは2チームごとに競う形式で、決まった時間内で周回コースを先に10周した方が勝者となる。ただし、トラックからはみ出るとペナルティーがつくため、正しく周回コースを回る技術も求められる。太もも、ふくらはぎの筋肉に電気的刺激を与えてペダルをこぐ。そのため、いかに刺激とこぐ動きを連動させ、上手にペダルを回して推進力につなげられるかが重要だ。上位チームではこの動きが非常に上手く実現できていた。
自転車タイプのチームが多い中、メルティンは車イスタイプのマシンで挑戦。残念ながら、3周でタイムアップとなったが、チームとしてベスト記録を出すことができた。優勝はTeamCleaveland。リカンベントタイプのマシンで他のチームに大差をつけ、勝利を勝ち取った。
試合結果→http://www.cybathlon.ethz.ch/en/cybathlon-news/cybathlon-results/fes-results.html
■電動車イスレース
電動車イスも6つの課題が設置されたコースを走行し、合計点数の高いチームが勝利というルールは変わらない。世間で出回っている電動車イスよりも高性能で、姿勢制御や階段の自動昇降などを備えた電動車イスをタッチパネルで制御しながら障害物にチャレンジする。机に正しくつく、スラローム、ドアのついたスロープの上り下り、ガタガタ道、バンク、階段の上り下りと、車イスを利用する上での障害がコースに設置されている。
義手や義足レースを同じく予選の後、上位4チームがAファイナル、次点の4チームがBファイナルに出場して順位を決定する。上位6位までが満点をマークし、タイムが勝敗を分ける結果となった。このような接戦のなか、和歌山大学RT-Moversは4位に食い込み、Aファイナルに進出。レース後半にあるバンクや階段の上り下りで苦戦するチームが多い中、RT-Moversは課題をスムーズにクリアした。この後半の追い上げはレースを盛り上げた。Aファイナルでも健闘し、見事4位入賞を果たし、チームとしてベスト記録の更新も果たした。このレースをおさえて優勝したのは地元スイスのHSR Enhancedだ。最後の階段で香港のチームをかわし、勝利をつかんだ。

試合結果→http://www.cybathlon.ethz.ch/en/cybathlon-news/cybathlon-results/wheel-results.html
■電動外骨格レース
外骨格レースは、義足レースと障害物の内容はほぼ同じだが、ハードルの代わりにスラロームが設置されるなど、一部がことなる。下半身がほとんど動かないパイロットがモーターで稼働するパワードスーツのような装置を装着して障害物にチャレンジする。他のレースと異なり満点がでなかったが、これはおそらく外骨格の分野がまだ研究段階のものが多いことを反映していると思われる。特に、レース最初の課題であるソファに座る動作でうまくいかないチームが続出した。これは太ももに力を入れ、膝を上手く使って立ち上がるという人間の動作の仕組みが機械に十分に反映できていないためだと考えられる。また、バンクで苦戦するチームも多かった。これは脚と腰を上手く使ってバランスをとるという何気ない動きが難しいということなのだと思わされた。このような状況の中で最高得点をマークしたドイツのReWalkが勝利を収めた。
試合結果→http://www.cybathlon.ethz.ch/en/cybathlon-news/cybathlon-results/exo-results.html
■BMIレース
BMIは首から下が麻痺しているパイロットが、脳波測定装置をつけてコンピューター上のアバターを操作しながらコース上の課題をクリアしていくレースだ。課題は、回る、ジャンプする、スライディングする、何もしない、の4つだ。本当に回れと考えて回すわけではなく、決まった脳波のインプットがあるとアバターが回るという仕組みになっている。うまくできないとアバターは前に進まない。展示ブースにあったレースの体験ゲーム(動作は2種類)に私も挑戦してみたが、交互に出てくる課題にあわせて司令をかえることが予想以上に難しいものだった。このレースを制したのは、地元スイスのBrain Tweakersだ。
試合結果→http://www.cybathlon.ethz.ch/en/cybathlon-news/cybathlon-results/bci-results.html
人間と機械の融合
人間の意志が届かない機械に、神経を伝播する電気信号や、脳波を介して「動く」という司令を伝える、膝の動き、くるぶしの動き、手の動きの原理を理解し、よりスムーズな装具の動きに反映する。さらに、筋肉に電気信号を与えると、筋肉が動くことを利用する。人間がどのように体を動かしているかが明らかになってきたからこそ、サイバスロンが実現できるようになったのだと一日中観戦する中で感じた。
体の仕組みを理解する研究がさらに進むことで、サイバスロン自体もより発展していくことだろう。その先には、健常者も障がい者も機械を自分の体の一部として意のままに操って活躍する時代がやってくるのではないだろうか。